


एकल अक्ष पोजिसनर/स्वचालित वेल्डिङ पोजिसनर
प्राविधिक प्यारामिटरहरू
| एकल-अक्ष तेर्सो सर्वो पोजिसनर | एकल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोजिसनर | स्पिन्डल बक्स प्रकार एकल-अक्ष सर्वो पोजिसनर | |||||||||
| सिरियल नम्बर | परियोजनाहरू | प्यारामिटर | प्यारामिटर | टिप्पणीहरू | प्यारामिटर | प्यारामिटर | प्यारामिटर | टिप्पणीहरू | प्यारामिटर | प्यारामिटर | टिप्पणीहरू |
| 1. | मूल्याङ्कन गरिएको लोड | २०० किलो | ५०० किलोग्राम | मुख्य अक्षको R300mm/ R400mm त्रिज्या भित्र | ५०० किलोग्राम | ८०० किलोग्राम | १२०० किलोग्राम | मुख्य अक्षको R400mm/R500mm/R750mm त्रिज्या भित्र | २०० किलो | ५०० किलोग्राम | यो स्पिन्डल अक्षको R300mm त्रिज्या भित्र छ। भित्री, गुरुत्वाकर्षण केन्द्रदेखि फ्ल्यान्जको दूरी ≤३०० मिमी |
| 2. | मानक गाइरेसन त्रिज्या | R३०० मिमी | R४०० मिमी | R600 मिमी | R७०० मिमी | R900 मिमी | R600 मिमी | R600 मिमी | |||
| 3. | अधिकतम घुम्ने कोण | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | ±३६०° | |||
| 4. | मूल्याङ्कन गरिएको घुम्ने गति | ७०°/सेकेन्ड | ७०°/सेकेन्ड | ७०°/सेकेन्ड | ७०°/सेकेन्ड | ५०°/सेकेन्ड | ७०°/सेकेन्ड | ७०°/सेकेन्ड | |||
| 5 | दोहोर्याउनुहोस् स्थिति शुद्धता | ±०.०८ मिमी | ±०.१० मिमी | ±०.१० मिमी | ±०.१२ मिमी | ±०.१५ मिमी | ±०.०८ मिमी | ±०.१० मिमी | |||
| 6 | तेर्सो रोटरी डिस्कको आकार | Φ६०० | Φ८०० | - | - | - | - | - | |||
| 7 | विस्थापन फ्रेमको सीमा आयाम (लम्बाइ × चौडाइ × उचाइ) | - | - | २२०० मिमी × ८०० मिमी ×९० मिमी | ३२०० मिमी × १००० मिमी × ११० मिमी | ४२०० मिमी × १२०० मिमी × ११० मिमी | - | - | |||
| 8 | स्थिति परिवर्तनकर्ताको समग्र आयाम (लम्बाइ × चौडाइ × उचाइ) | ७७० मिमी × ६०० मिमी × ८०० मिमी | ९०० मिमी × ७०० मिमी × ८०० मिमी | २९०० मिमी × ६५० मिमी × ११०० मिमी | ४२०० मिमी × ८५० मिमी × १३५० मिमी | ५४०० मिमी × १००० मिमी × १५०० मिमी | १०५० मिमी × ६२० मिमी × १०५० मिमी | १२०० मिमी × ७५० मिमी × १२०० मिमी | |||
| 9 | स्पिन्डल रोटरी डिस्क | - | - | Φ३६० मिमी | Φ४०० मिमी | Φ४५० मिमी | Φ३६० मिमी | Φ४०० मिमी | |||
| 10 | पहिलो अक्ष परिक्रमाको केन्द्र उचाइ | ८०० मिमी | ८०० मिमी | ८५० मिमी | ९५० मिमी | ११०० मिमी | ८५० मिमी | ९०० मिमी | |||
| 11 | विद्युत आपूर्ति अवस्थाहरू | तीन-चरण २००V±१०%५०HZ | तीन-चरण २००V±१०%५०HZ | आइसोलेसन ट्रान्सफर्मरको साथ | तीन-चरण २००V±१०%५०HZ | तीन-चरण २००V±१०%५०HZ | तीन-चरण २००V±१०%५०HZ | आइसोलेसन ट्रान्सफर्मरको साथ | तीन-चरण २००V±१०%५०HZ | तीन-चरण २००V±१०%५०HZ | आइसोलेसन ट्रान्सफर्मरको साथ |
| 12 | इन्सुलेशन वर्ग | H | H | H | H | H | H | H | |||
| 13 | उपकरणको खुद तौल | लगभग २०० किलोग्राम | लगभग ४०० किलोग्राम | लगभग ५०० किलोग्राम | लगभग १००० किलोग्राम | लगभग १६०० किलोग्राम | लगभग २०० किलोग्राम | लगभग ३०० किलोग्राम | |||
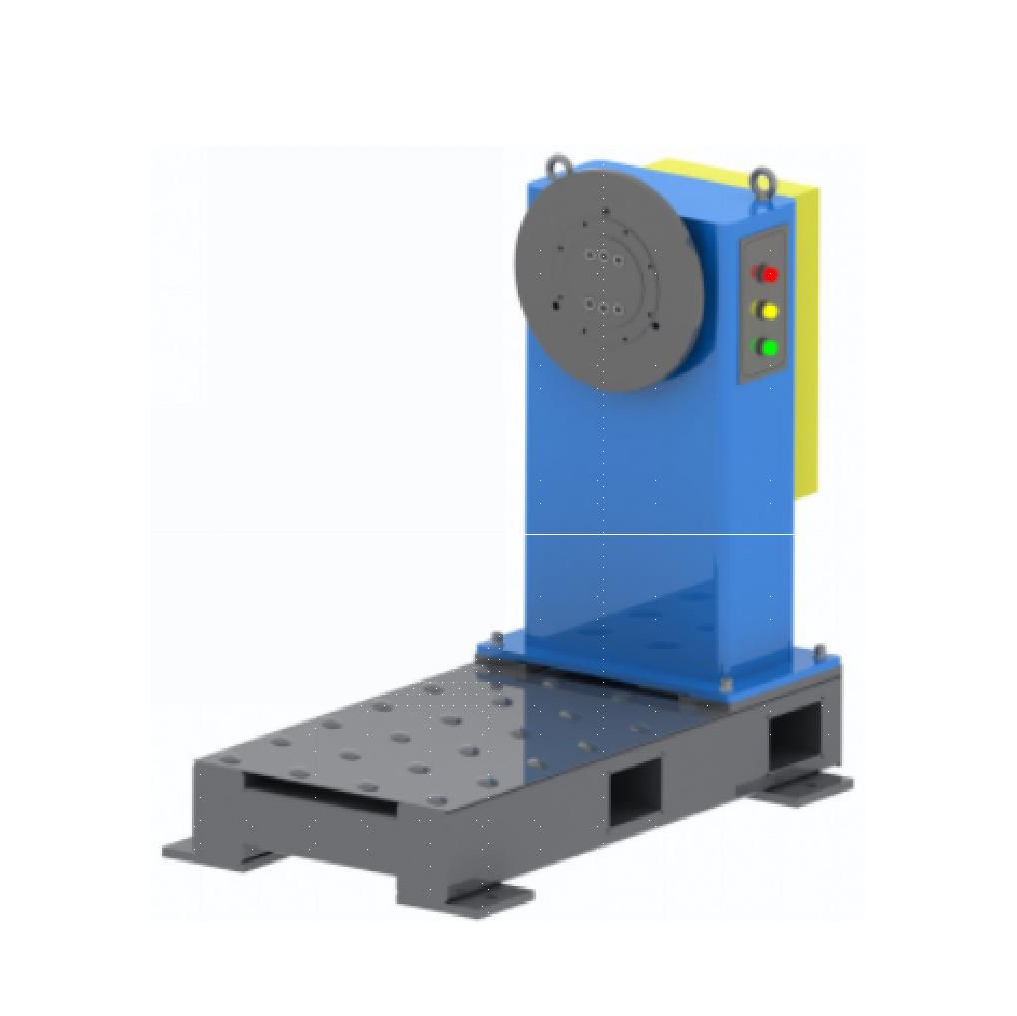
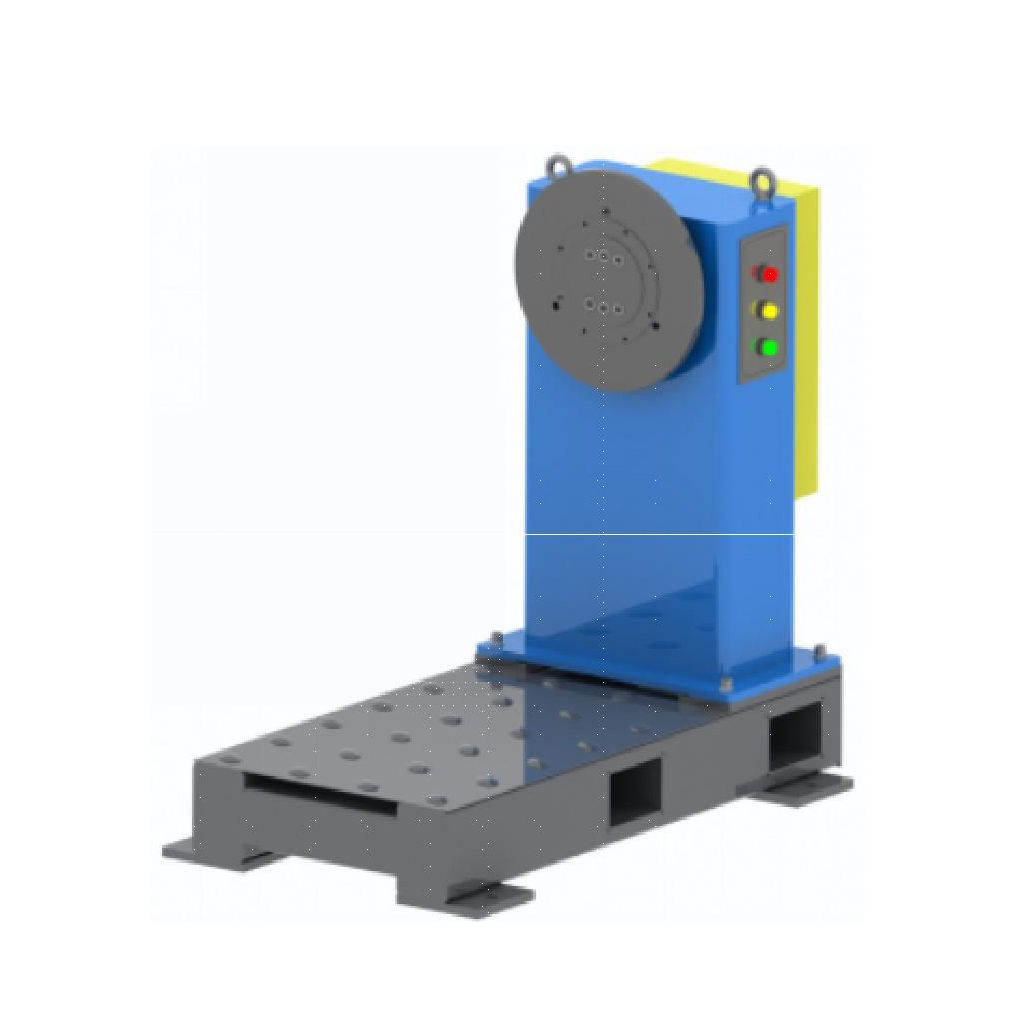
एकल-अक्ष तेर्सो सर्वो पोजिसनर

एकल-अक्ष मुख्य ट्रंक प्रकार सर्वो पोजिसनर
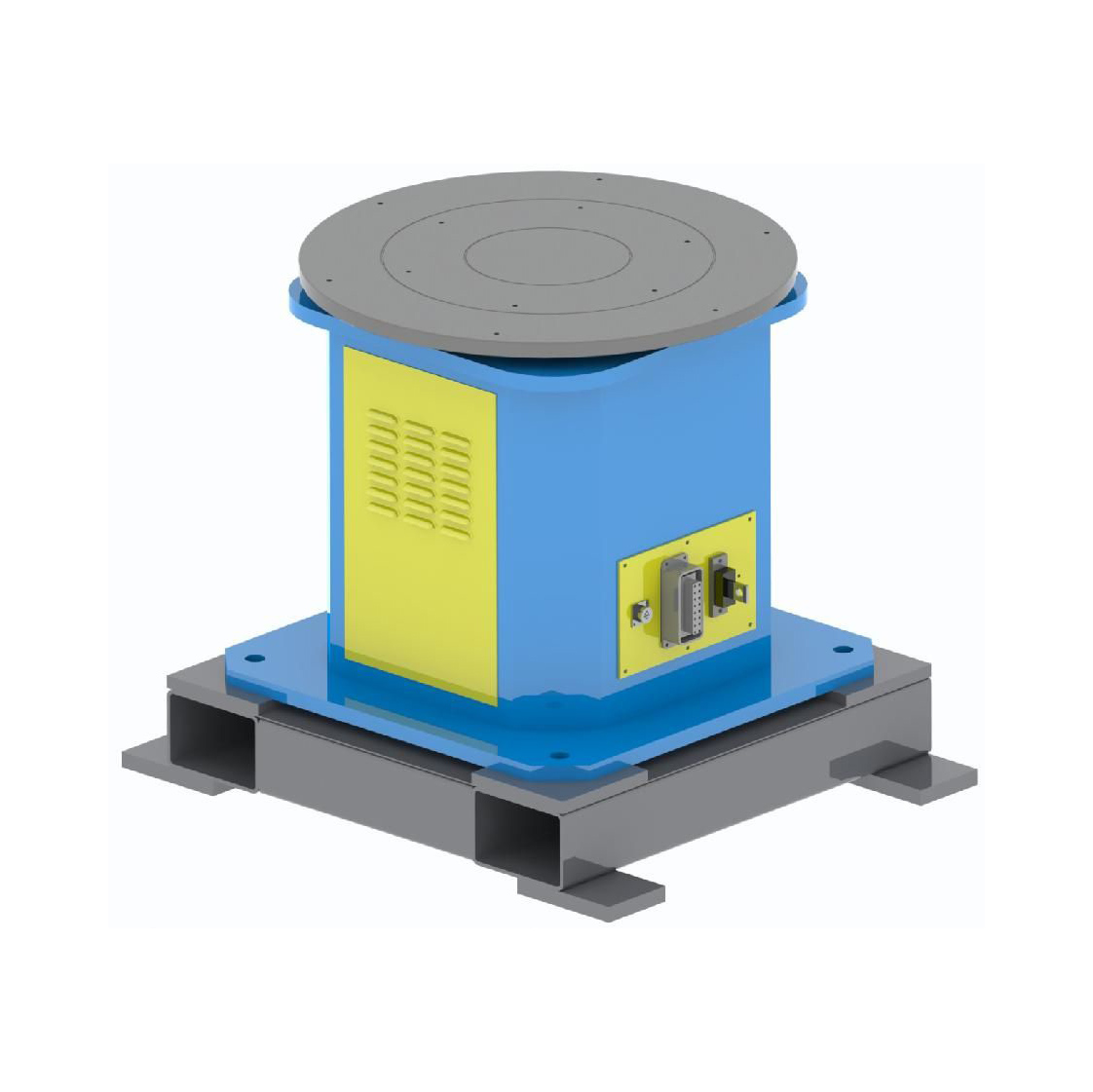
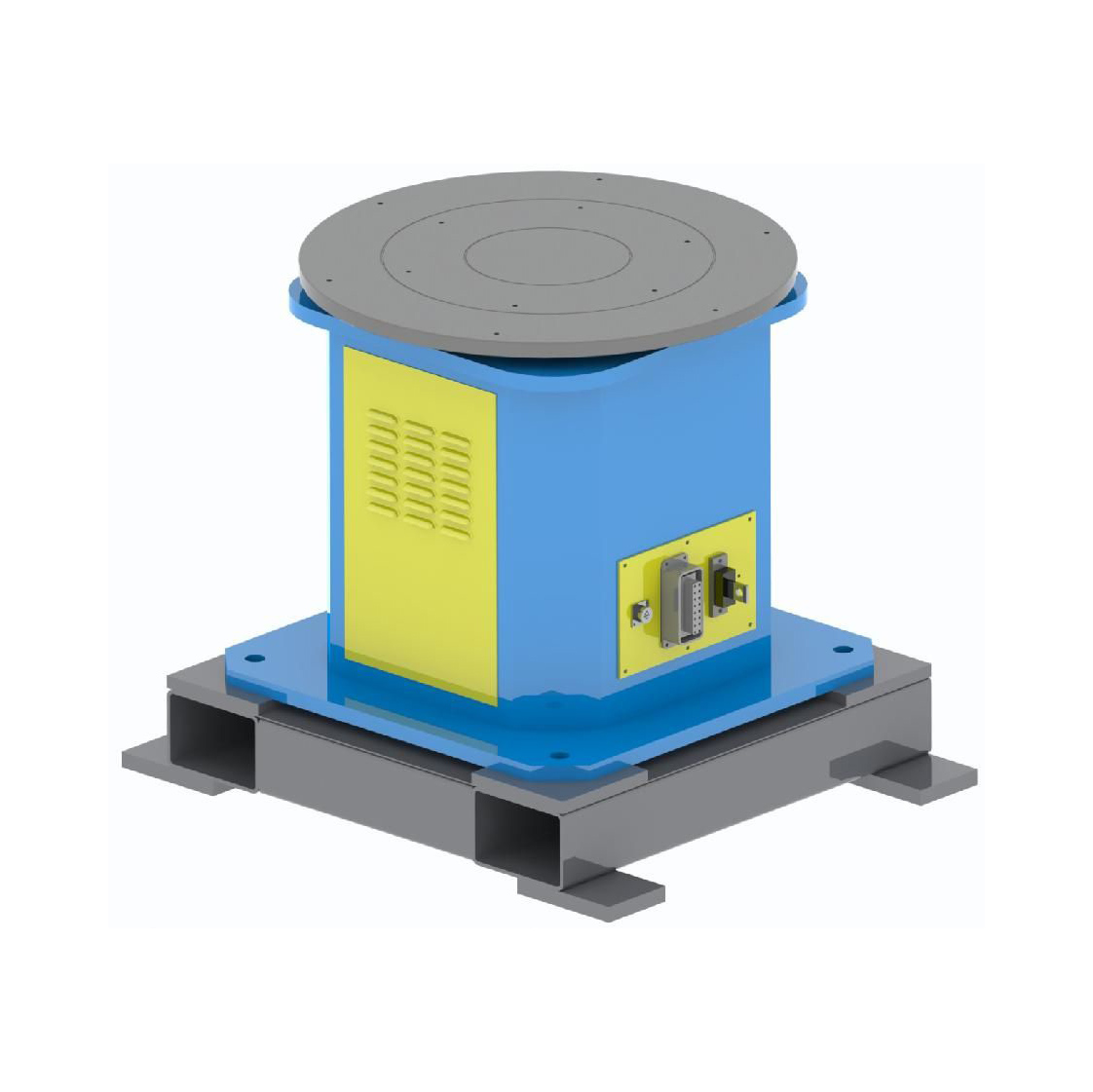
स्पिन्डल बक्स प्रकार एकल-अक्ष सर्वो पोजिसनर
संरचना परिचय
एकल-अक्ष तेर्सो सर्वो पोजिसनर मुख्यतया इन्टिग्रल फिक्स्ड बेस, रोटरी स्पिन्डल बक्स, तेर्सो रोटरी डिस्क, एसी सर्वो मोटर र आरभी प्रेसिजन रिड्यूसर, कन्डक्टिभ मेकानिज्म, प्रोटेक्टिभ शिल्ड र इलेक्ट्रिक कन्ट्रोल सिस्टम मिलेर बनेको हुन्छ। फिक्स्ड बेसलाई उच्च-गुणस्तरको प्रोफाइलले वेल्ड गरिएको हुन्छ। एनिलिङ र तनाव कम गरेपछि, उच्च मेसिनिङ शुद्धता सुनिश्चित गर्न र प्रमुख स्थानहरूको परिशुद्धता प्रयोग गर्न व्यावसायिक मेसिनिङद्वारा प्रशोधन गरिनेछ। सतहमा एन्टी-रस्ट उपस्थिति पेन्ट स्प्रे गरिएको छ, जुन सुन्दर र उदार छ, र ग्राहकको आवश्यकता अनुसार रंग अनुकूलित गर्न सकिन्छ।
रोटरी स्पिन्डल बक्सको लागि छनोट गरिएको उच्च-गुणस्तरको प्रोफाइल स्टीलले वेल्डिङ र एनिलिङ र व्यावसायिक मेसिनिङ पछि यसको दीर्घकालीन स्थायित्व र स्थिरता सुनिश्चित गर्न सक्छ। तेर्सो रोटरी डिस्क उच्च-गुणस्तरको प्रोफाइलहरूसँग वेल्ड गरिएको छ। एनिलिङ उपचार पछि, व्यावसायिक मेसिनिङले सतहको फिनिशको डिग्री र यसको आफ्नै स्थिरता सुनिश्चित गर्न सक्छ। माथिल्लो सतह मानक स्पेसिङको साथ स्क्रू प्वालहरू सहित मेसिन गरिएको छ, जुन ग्राहकहरूको लागि पोजिसनिङ टूलिङ स्थापना र फिक्स गर्न सुविधाजनक छ।
पावर मेकानिज्मको रूपमा एसी सर्वो मोटर र आरभी रिड्यूसर छनोट गर्नाले घुम्ने स्थिरता, स्थितिको शुद्धता, लामो स्थायित्व र कम विफलता दर सुनिश्चित गर्न सकिन्छ। प्रवाहकीय मेकानिज्म पीतलबाट बनेको हुन्छ, जसको राम्रो प्रवाहकीय प्रभाव हुन्छ। प्रवाहकीय आधारले अभिन्न इन्सुलेशन अपनाउँछ, जसले सर्वो मोटर, रोबोट र वेल्डिङ पावर स्रोतलाई प्रभावकारी रूपमा सुरक्षित गर्न सक्छ।
विद्युतीय नियन्त्रण प्रणालीले स्थिर प्रदर्शन र कम विफलता दरको साथ, पोजिसनर नियन्त्रण गर्न जापानी ओम्रोन पीएलसी अपनाउँछ। प्रयोगको गुणस्तर र स्थिरता सुनिश्चित गर्न घर र विदेशका प्रसिद्ध ब्रान्डहरूबाट विद्युतीय कम्पोनेन्टहरू चयन गरिन्छ।








